Robot sinh học hay robot mô phỏng sinh vật (animal like robots) là một lĩnh vực đầy hứa hẹn và hấp dẫn cũng như thách thức với các nhà nghiên cứu. Bởi robot vốn dĩ đã rất ưu việt trong việc thích nghi với các môi trường làm việc công nghiệp với sự lặp lại và độ chính xác tuyệt vời thay thế cho sức người trong điều kiện làm việc khắt khe, nhưng robot sinh học (bio-robot) còn hơn thế nữa, nhờ những sự thiết kế và phát triển dựa trên các nguyên tắc sinh học, hoặc kết hợp các yếu tố sinh học với cơ học và điện tử. Những robot này có thể mô phỏng các chức năng sinh học tự nhiên hoặc sử dụng các vật liệu và cấu trúc từ sinh học để thực hiện các nhiệm vụ cụ thể. Robot sinh học có khả năng tương tác với môi trường sống theo cách tự nhiên, giống như các sinh vật sống.
Trong các hướng trọng tâm của robot sinh học, việc tạo ra các bó cơ nhân tạo với các cơ chế phản ứng và hoạt động tương ứng với cơ bắp thông thường là một lĩnh vực quan trọng trong chế tạo robot sinh học trong việc tạo ra các cử chỉ và hoạt động mô phỏng con người thực. Nội dung của bài viết này sẽ đi sâu vào việc sử dụng công nghệ in 3D sinh học kết hợp với cơ nhân tạo mô phỏng cấu trúc nano để tạo ra robot mềm, đây là một hướng đi đầy tiềm năng trong lĩnh vực robot sinh học. Quá trình này bao gồm việc tích hợp các vật liệu sinh học và cơ nhân tạo tiên tiến vào các thiết kế robot mềm để mô phỏng các chuyển động tự nhiên và chức năng của cơ thể sinh vật. In 3D sinh học có thể tạo ra các cấu trúc mô mềm có tính đàn hồi và chức năng tương tự như mô sống. Khi được tích hợp vào robot mềm, những cấu trúc này giúp robot có khả năng thực hiện các chuyển động phức tạp và tương tác với môi trường một cách linh hoạt.
Trước đây, các thiết bị robot mềm sử dụng tế bào đã từng được kỳ vọng tạo ra sự ảnh hưởng chuyển biến cho khả năng thiết kế máy và hệ thống có cảm nhận và phản ứng một cách linh động với một vùng các tín hiệu phức tạp của môi trường. Các đổi mới tiên tiến trong lĩnh vực vật liệu sinh học (biomaterial), tạo tác mô (tissue engineering), và in 3 chiều (3D printing) đã được tích hợp để đạt được các máy sinh học kích thước cen-ti-mét có thể điều khiển được và có thể vận động trên bề mặt chất lỏng. Nhờ việc là một phần của sự co giãn tự nhiên và các cấu trúc sống, cho phép một phản ứng linh động tới các tác nhân áp dụng hoặc môi trường, những máy sinh học này có thể dùng trong nhiều ứng dụng đa dạng và thể hiện sự vượt trội trong điều khiển chức năng mức cao của hệ thống robot sinh học. Một máy sinh học như vậy đã đươc thực hiện bởi nhóm nghiên cứu tại Mỹ, tác giả Caroline và các đồng nghiệp (C. Cvetkovic, 2014, 10125–10130). Kết quả nghiên cứu đã được đăng trên tạp chí PNAS năm 2014. Nhóm nghiên cứu đã chế tạo được thiết bị sinh học bio-bots bằng việc in hydrogel 3 chiều vật lý không đối xứng dùng các tế bào nối bó cơ và hệ xương. Các kích thích điện tạo ra sự co của các tế bào trong bó cơ và lưới cử động với vận tốc lớn nhất khoảng 156 μm/s, tương ứng với trên 1,5 chiều dài bó cơ trong 1 phút ( Hình 1)
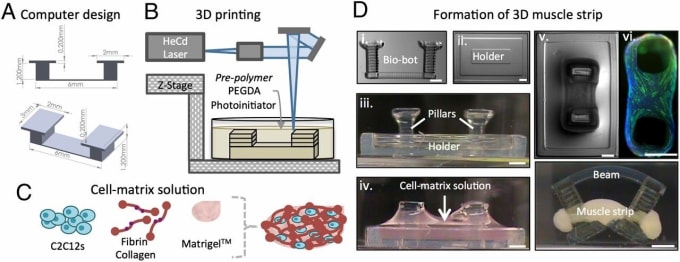 |
| Hình 1: Quy trình chế tạo cấu trúc hydrgel và sự hình thành bó cơ 3D. (A) phần mềm thiết kế hỗ trợ từ máy tính được sử dụng để thiết kế bio-bots với các kích thước mong muốn. Kích thước đo sử dụng đơn vị mm. (B) một SLA được dùng để polymer hóa các cấu trúc hydrogel trong một quá trình in cộng lớp. (C) dung dịch chứa ma trận tế bào có chứa nguyên bào cơ xương C1C12, ma trận protein ( fibrin hoặc colagen I), và Matrigel. (D) chế tạo bio-bot (i, nhìn từ bên) và đế giữ (ii, nhìn từ trên xuống). Dung dịch ma trận tế bào được nhỏ giọt vào cấu trúc đã được polymer hóa có chứa cấu trúc bio-bot (iii and iv, nhìn từ bên). Các tế bào và ma trận được rút gọn xung quanh các trụ để tạo ra một bó cơ vững chắc (v và vi, nhìn trên xuống với kháng nguyên MF-20, xanh lá cây, và DAPI, xanh da trời) và thiết bị được lấy ra từ giá đỡ ( vii, nhìn từ bên). Các thanh tỷ lệ là 1mm. (C. Cvetkovic, 2014, 10125–10130) |
Ngày nay, với công nghệ in sinh học 3 chiều (3D bio-printing), sự mở rộng tương xứng với kích thước thực của các cơ bắp con người đang cho thấy những tiềm năng mới nhờ sự cải tiến lớn trong công nghệ chế tác vật liệu vô cơ cao phân tử – polymer. Cơ nhân tạo để mô phỏng hoạt động tự nhiên của cơ bắp con người hay các động vật là một lĩnh vực rất hấp dẫn, đặc biệt trong lĩnh vực vi robot hay lĩnh vực mô phỏng hoạt động của con người của robot cỡ lớn. Thành công trong lĩnh vực này sẽ đưa việc chế tạo robot lên một tầm cao mới với sự mềm dẻo và linh động trong các cử động và phản ứng, tương tác tự nhiên, thậm chí có thể hướng đến việc chế tạo robot mô phỏng con người bằng in 3D.
Một công bố gần đây trên tạp chí Nature Nanotechnology từ nhóm nghiên cứu đến từ viện công nghệ Massachsett, Cambridge, Mỹ đã chỉ ra rằng các chuỗi mắt xích polymer vô định hình phân bố ngẫu nhiên tạo ra cho các vật liệu mềm (bao gồm hydrogel và các chất đàn hồi) độ mềm và khả năng biến dạng. Tuy nhiên, nhược điểm của chuỗi polymer vô định hình là tính chất cơ học kém hơn về độ cứng, ngưỡng mỏi thấp, và độ bền kéo thấp. Do đó đã làm hạn chế đáng kể phạm vi ứng dụng của vật liệu mềm dạng này.
Một cách hiệu quả để nâng cao tính chất cơ học của vật liệu mềm là thiết kế dạng cấu trúc nano, chẳng hạn như tạo ra miền tinh thể nano trong vật liệu. Ví dụ, đưa các miền tinh thể nano (nanocrystalline domains) vào hydrogel rượu polyvinyl vô định hình (amorphous polyvinyl alcohol hydrogels) có thể nâng cao ngưỡng mỏi của vật liệu từ 10 đến 1.000 J/m2 (S. Lin,2019; Hua, M. 2021,594–599) (Hình 2), và ngưỡng mỏi bề mặt của polyvinyl alcohol hydrogel bám trên thủy tinh từ 10 đến 800 J/m2 (Liu, J.,2020, 1071). Các phương pháp phổ biến để đưa miền tinh thể nano vào trong vật liệu mềm bao gồm bay hơi dung môi, kéo căng cơ học, kéo nhiệt và dập tắt nhanh. Một thách thức quan trọng là thiết kế chính xác kích thước, mật độ và sự phân bố không gian của các miền tinh thể nano trong vật liệu mềm.
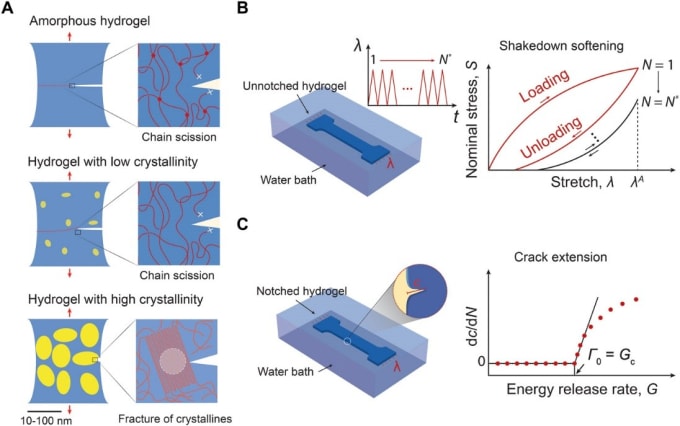 |
| Hình 2: Nguyên lý thiết kế hydrogel dạng mảnh chống mỏi. (A) Mô tả sự lan truyền vết nứt mỏi trong một hydrogel vô định hình ,và trong hydrogels có mức kết tinh thấp, mức kết tinh cao dưới các chu kỳ tải. Khu vực màu vàng thể hiện vùng kết tinh và khu vực màu xanh thể hiện vùng vô định hình. Trong hydrogel vô định hình và hydrogel với mức kết tinh thấp, ngưỡng mỏi có thể được bổ sung tới năng lượng cần thiết để tách mảnh một lớp đơn của mắt xích polymer trên một đơn vị diện tích. Trong hydrogel với mức kết tinh cao, sự lan truyền vết nứt mỏi cần các mảnh của vùng kết tinh. (B) Minh họa về đo lường áp lực chuẩn hóa S và đường cong biến dạng giãn λ trên N chu kỳ của biến dạng đặt λA, đường cong lực kéo-độ giãn đạt được trạng thái ổn định khi N đạt một giá trị tới hạn N*. (C) minh họa của việc đo lường sự mở rộng vết nứt trên chu kỳ dc/dN theo đường cong tỷ lệ năng lượng thoát ra G. Bằng cách ngoại suy tuyến tính đường cong để chặn hoành độ, chúng ta có thể đạt xấp xỉ tỷ lệ thoát năng lượng cực trị Gc, mà dưới đó, vết nứt mỏi sẽ không lan truyền dưới một chu kỳ tải vô hạn. Bằng cách định nghĩa, ngưỡng nứt mỏi Γ0 sẽ bằng với tỷ lệ phát năng lượng cực trị Gc. (S. Lin,2019) |
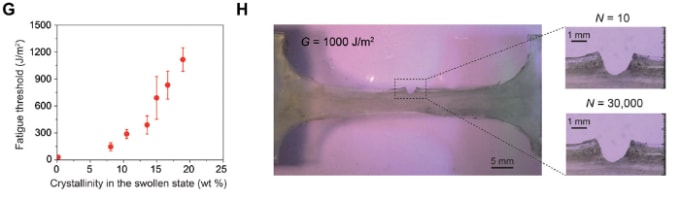 |
| Hình 3: Đo ngưỡng mỏi (đứt gãy) của PVA hydrogels.Ngưỡng mỏi tăng lên theo độ kết tinh của hydrogel trong trạng thái trương (G). Hình H xác nhận ngưỡng mỏi 1000 J/m2 trong 90 phút nung khô hydrogel dùng phương pháp kiểm tra va đập đơn. (S. Lin,2019) |
Bài viết trên Tạp chí Nature Nanotechnology của Lang và đồng nghiệp (Lang, C., 2022) đã công bố kết quả nghiên cứu liên quan đến việc thiết kế cấu trúc nano trong sợi vật liệu mềm (xem hình 4). Các sợi cơ nhân tạo có cấu trúc nano tạo ra đồng thời các chỉ số cao về mặt: ứng suất truyền động (lên đến 5,5 MPa), biến dạng truyền động (lên đến 80%), hiệu suất truyền động (lên đến 75,5%), độ dẻo dai/cứng (lên đến 121,2 MJ/m3) và độ bền kéo (lên đến 150 MPa) (Lin, S., 2022). Độ bền kéo của thép rơi vào khoảng 300-1700 Mpa, độ bền kéo của thép có cấu trúc khoảng 400 Mpa (Pavlina, 2008).
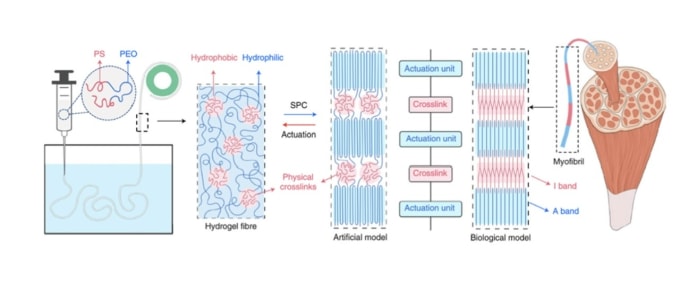 |
| Hình 4: Chế tạo sợi bằng SPC (strain-programmed crystallization - sự kết tinh được chương trình hóa bằng lực căng) của hydgogel tạo ra từ việc tự sắp xếp ABA triblock polymer. Trên hình mô tả dự đoán của quá trình chuẩn bị sợi và và sự so sánh về cấu trúc giữa một mô hình sợi nhân tạo SOS (poly(styrene)-b-poly(ethylene oxide)-b-poly(styrene)) và mô hình sinh học của tơ cơ (myofibri) (Lang, C., 2022). |
Các ứng dụng có thể kể đến cho robot sinh học rất đa dạng, từ lĩnh vực y sinh như lấy tín hiệu từ các sinh vật sống để phân tích cung cấp thêm các thông tin hữu ích mong muốn; phẫu thuật robot, thiết bị cấy ghép thông minh, hỗ trợ phục hồi chức năng như ốc tai điện tử, mắt sinh học, máy trợ thính neo xương, da cảm biến nhân tạo hay sinh học chỉnh hình, tới công nghệ môi trường như làm sạch môi trường hay thu thập dữ liệu sinh thái khu vực khắc nghiệt hoặc ứng dụng ngay trong nông nghiệp như thụ phấn nhân tạo, giám sát và chăm sóc cây trồng, thậm chí dùng trong các mô phỏng quá trình sinh học, nghiên cứu tương tác sinh học (Wikipedia, 2011).
Các cải tiến ấn tượng của công nghệ Polymer trong việc mô phỏng hoạt động cơ bắp của con người như đã mô tả ở bài, về sợi kết tinh lập trình hóa cho lực căng từ SOS và thiết kế hydrogel chống mỏi từ PVA đang góp phần thúc đẩy mạnh mẽ cho các các ứng dụng robotic với sự mềm mại và uyển chuyển giống người hơn. Tiềm năng ứng dụng của các nghiên cứu cho các loại animal like-robot sẽ mở rộng trong việc nghiên cứu khi các cơ chế hoàn thiện.
Và công nghệ in 3D đang là nền tảng đầy hứa hẹn cho sự phát triển và ứng dụng của nhiều loại vật liệu trong các lĩnh vực nghiên cứu và sản xuất khác nhau, từ cỡ nhỏ như các loài côn trung đến các kích thước lớn cỡ con người và cả trong các lĩnh vực xây dựng.